Engineering Solutions in 3D Spatial Intelligence
Professional Services, Smart Sensor Integration, Urban Digital Twins
Our Professional ServicesWhat We Offer
LMY invites individuals and organizations from various industries to explore our unique, rich and flexible technological solutions effectively combining Photogrammetry, Navigation, GIS, Computer Vision and AI
Professional Service
Drawing upon our extensive academic knowledge and decades of industry experience, we have what is required to cater to the specific needs, preferences, and limitations faced by our clients in their pursuit of innovation for their organizations.
Algorithm & Software Prototyping
We build robust, scalable and user-friendly software. Our proprietary C++ algo library for image matching, registration, targeting and 3D clustering successfully deployed in tens of operational solutions and is available to our clients.
Smart Integration of Spatial Sensors
We develop intelligent payloads by combining spatial sensors with our proprietary, patent pending, sensor fusion engine, improving efficiency, cutting integration costs and enhancing product quality.
LMY - A Turn-key Solution Provider
With more then twelve years of dedicated investment in algorithmic and software infrastructure, we grew up to become a turn-key solutions provider in the Spatial Intelligence market, with a specific focus on Hybrid Sensor payloads and Urban Digital Twin suites.

Technology
Multidisciplinary approach to solving 3D spatial intelligence challenges integrating Imaging Sensors, Photogrammetry, Computer Vision and AI
Computer vision
Detection, Calibration, Localization, Navigation, Matching, Model driven HLV (High Level Vision)
Image & Video Analysis
Detection, Calibration, Localization, Navigation, Matching, Model driven HLV (High Level Vision)
AI & Deep Learning
Segmentation, Classification, Recognition
Augmented Reality & Virtual Reality
Proprietary, Unreal, Vuforia,Unity, ARCore, ARKit
Geospatial Analysis & Mapping
GIS, 3D Modeling, Photogrammetry, MMS, Data Visualization

Sensors & Sensor Fusion
Based on our twelve years of algorithmic and software development we can provide turn-key solutions in Spatial Intelligence, focusing on Hybrid Sensor payloads and Urban Digital Twin solutions


Services
We work closely with decision makers and technical personnel to guarantee their needs are met exactly and effectively

Scientific and Technical Consulting & Project Management
Public sector and defence professionals aiming to elevate their organization to the next level, can rely on LMY for scientific and technological support.
We provide a variety of services, including market and technological reviews, tender compilation, project management, and test field design and maintenance.
Each of these services is designed to help innovation initiatives remain on track, be delivered on time, and stay within budget. Please check some of them by following the link below.
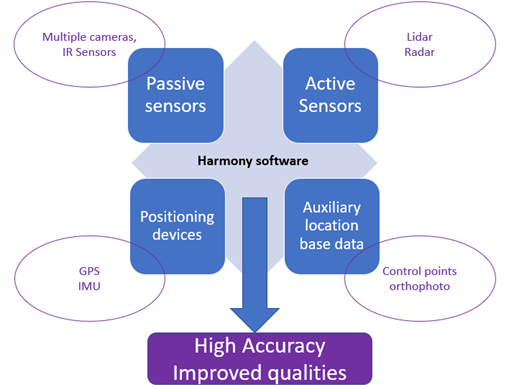
Smart (Spatial) Sensor Integration
Sensor data plays a crucial role in today’s technological landscape. Nevertheless, it is only through a smart integration of various types of sensors, full capabilities of sensor technology across various industries can be realized.
Whether you’re an entrepreneur developing new technology for your safety, agriculture or underground exploration business, a seasoned geo-spatial service provider looking to lower costs and enhance product quality, or a defense contractor seeking intelligence under tight restrictions, our smart sensor integration service is the solution you need.
Our patent-pending technology, the Harmony is what turns a collection of consumer-grade pieces of hardware into a powerful mapping & intelligence solution. To learn more, follow the link below.

Software and Algorithm development
Algorithm and Software development in the fields of mapping, computer vision and 3D spatial information. We are a one stop shop to validate a concept or build an MVP.
Our expertise and extensive development, spanning across modern platforms and technologies including native (IOS/Android), enterprise, web and cloud programming, has enabled us to deliver and maintain numerous projects across several industries. Our LMY-Photosphere photogrammetry and CV library is at the core of any piece of software we deliver.
Our business approach is flexible and fully aligns with our clients’ goals.
Please follow the link below to browse through a few hand-picked solutions from our range of offerings.

VISINT Labs Incubator
Our VISINT labs incubator provides both financial and technological support for early-stage ventures including knowledge transfer and technical team build-up.
PRODUCTS
LMY Smart-Reality Suite (LMY-SRS)
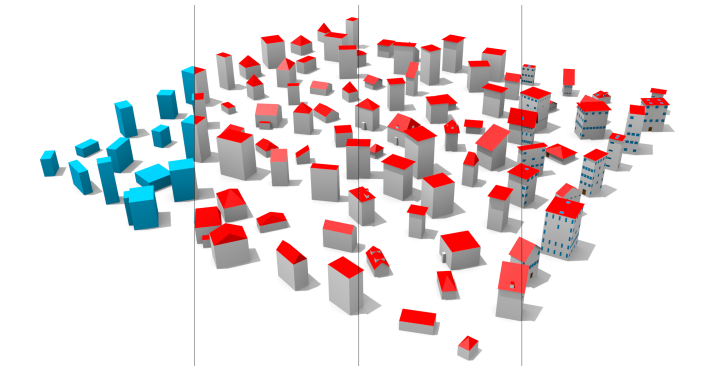
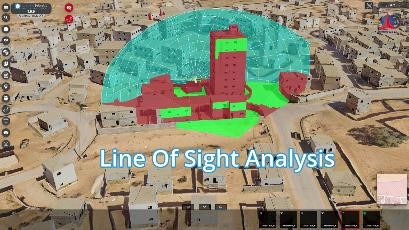
Advanced web platform utiliizng a variety of geospatial data sources for 3D semantic modeling, visualization, and analysis of an urban 3D DIGITAL TWIN (S3DDT).
LMY-SRS is the ultimate platform to tackle the most critical challenges in Urban Intelligence generation and management
The SRS ecosystem consists of four interconnected components – 3DBuilder, 3DExplorer, 3DEditor, and 3DAnalyser, responsible for creating, visualizing, managing, and analysing our S3DDT.
3DBuilder
End-to-End geoprocessing framework for continuous automatic generation of our S3DDT

3DExplorer
Specialized interactive platform, for visualization & analysis of our S3DDT

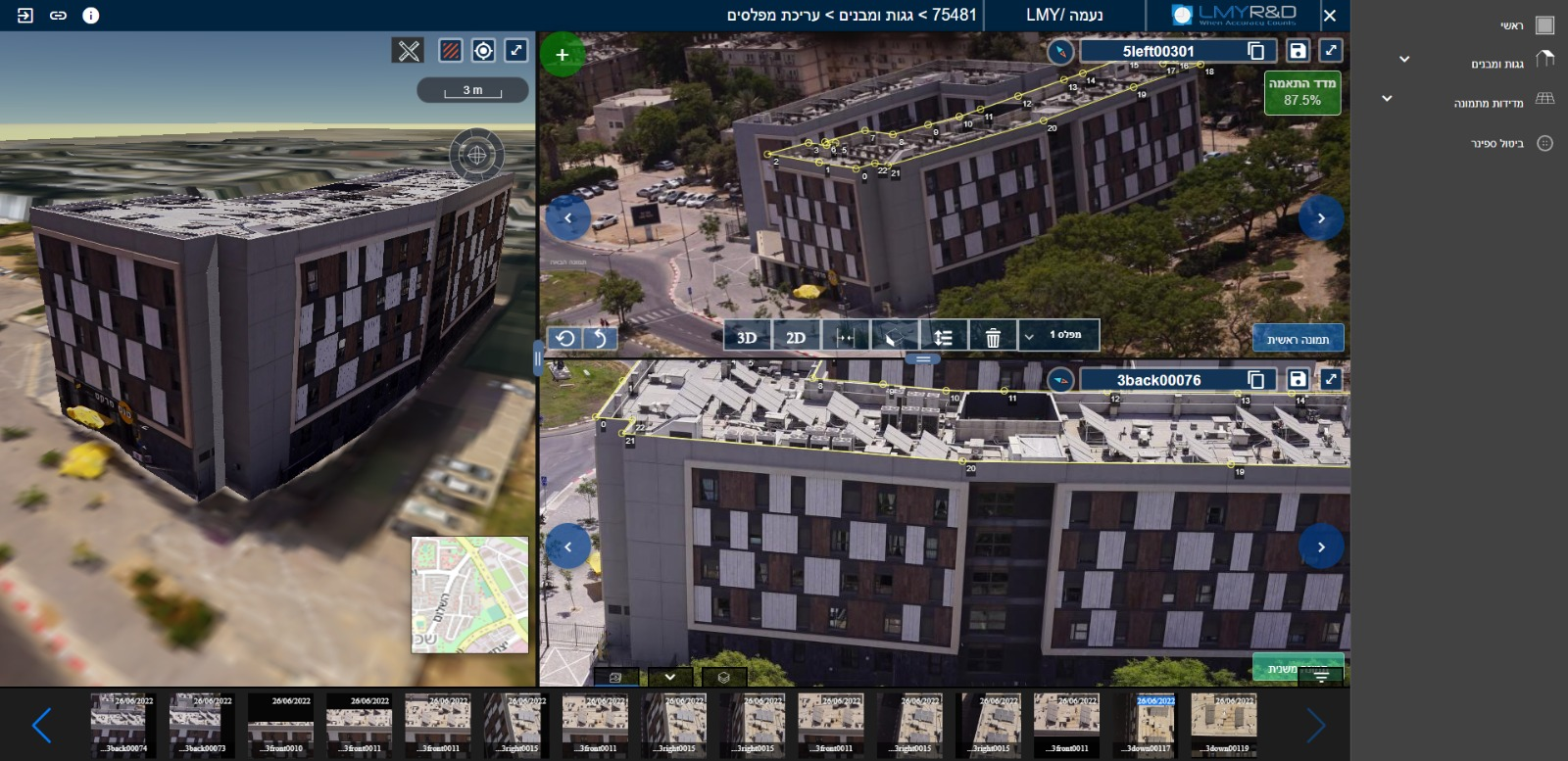
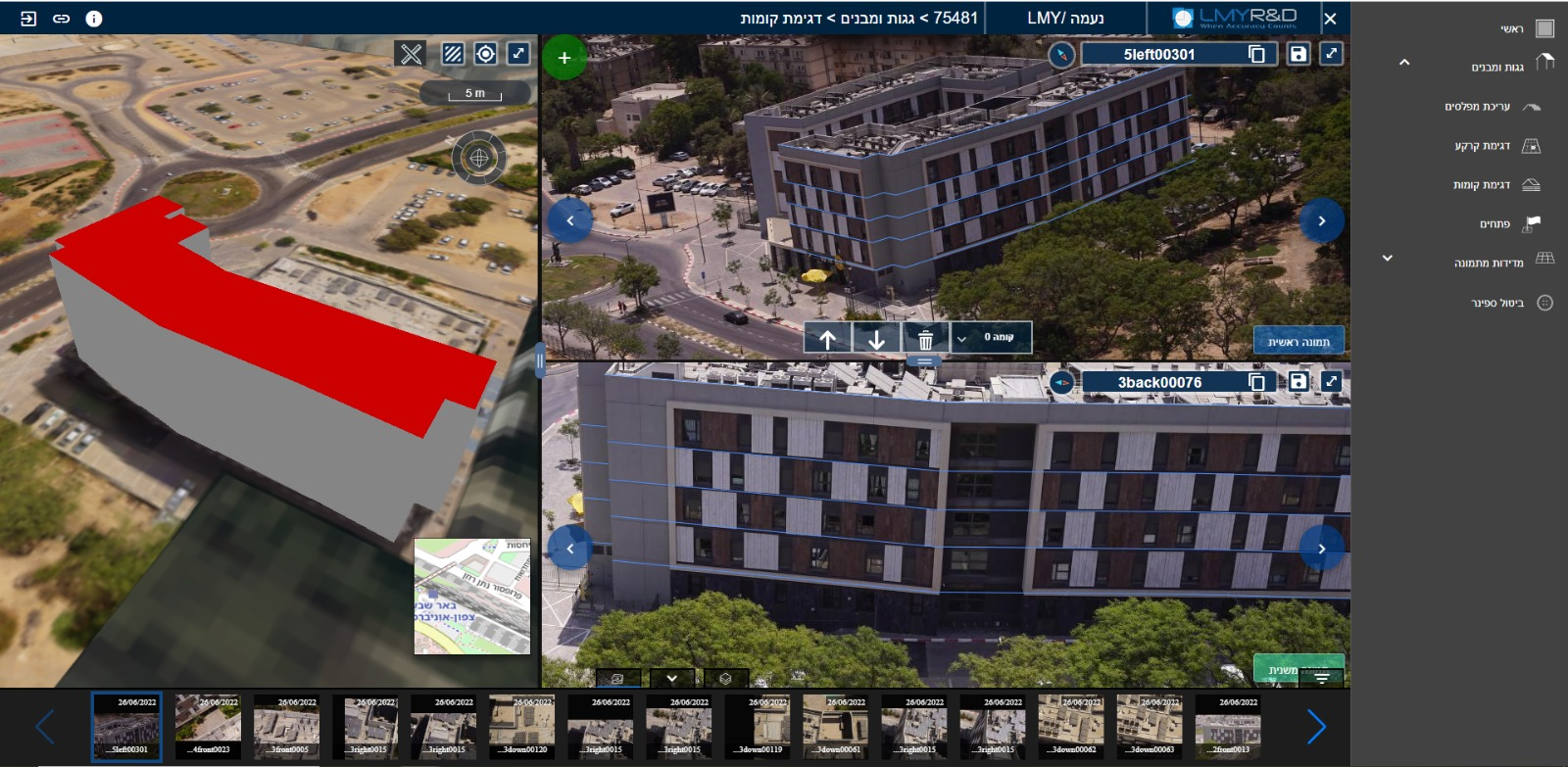
3DEditor
Specialized UI module for semi-automatic creation and editing of our S3DDT

3DServices
Machine API, offering extensive access to the entire suite functionality and S3DDT data
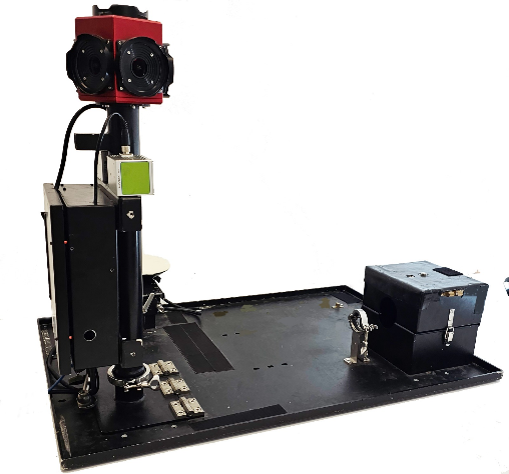
LMY-Eagle-TC1 Drone Sensors
The LMY Eagle-TC1 product family consists of the Velodyne (VLP16, VLP32) and Livox (Avia) lidar series and the ADTI 5-head stereoscopic mapping camera. Lightweight payload (2-3 kg) that can be attached to most drone models from various manufacturers.
Key Differentiators:
- Consumer-grade IMU&GPS (No dependency on high-quality direct geo-referencing)
- Near RT on-platform point-cloud generation
- No need for strip alignment
- Sub-pixel level registration between Lidar and SFM point clouds
- Particularly suited for corridor mapping and free flight maneuvers (single strip acquisition)
LMY Harmony fusion engine allows the creation of spatial products with a non-parallel quality and compatibility. Follow the clip above to get a glimpse of the system outcomes
Eagle-TC1-Velodyne

Eagle-TC1-Avia

The most cost-efficient drone sensor for AGL up to 250m

The most cost-efficient drone sensor for AGL up to 250m
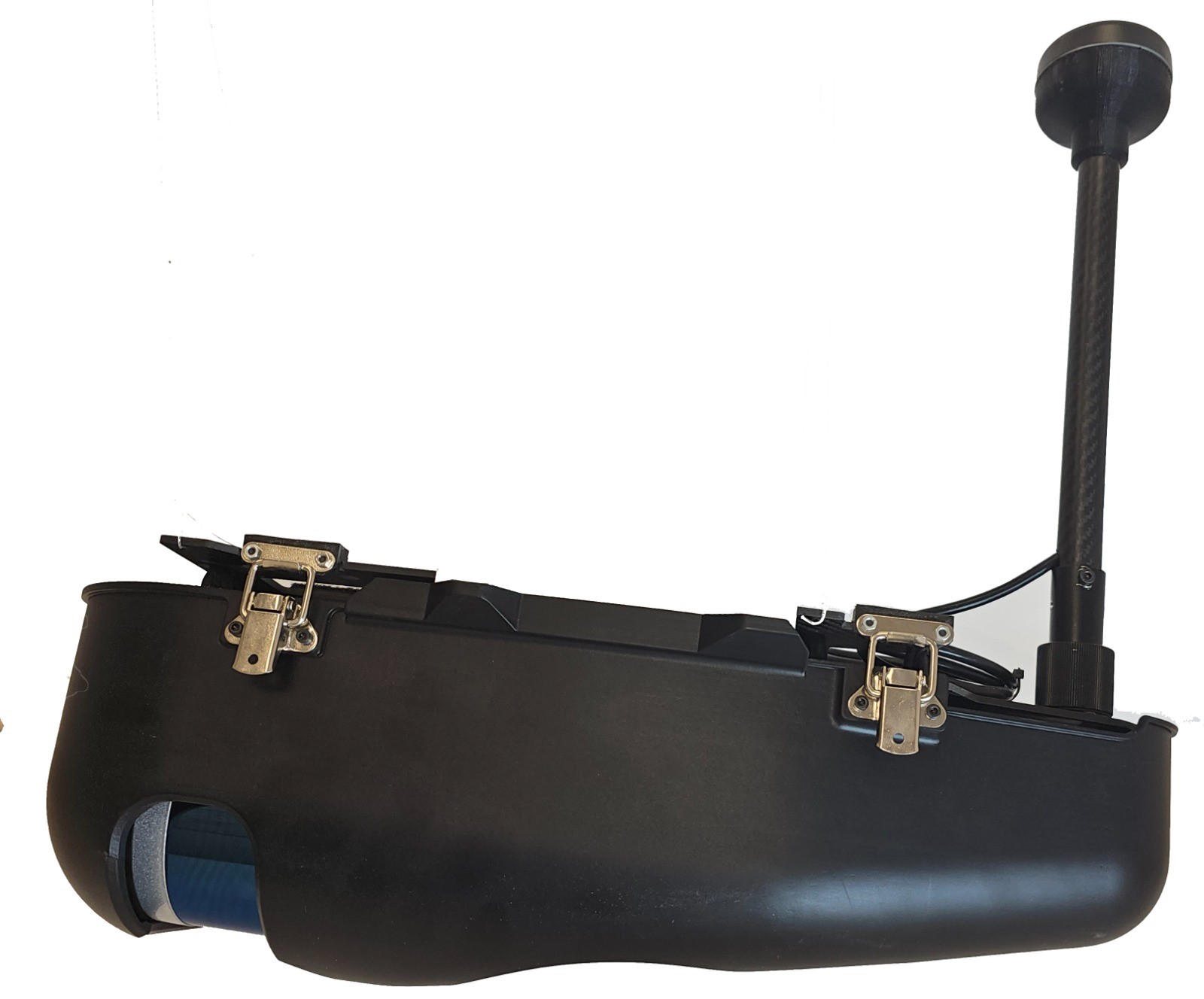
LMY-360Rover-TC1 Mobile Mapper
The LMY 360Rover-TC1 mapper is a land-base mobile solution that employs similar technologies and methodologies as those used in the Eagle drone family.
Equipped with a single Lady-Bug 5 360-camera and featuring identical lidar sensors (Velodyne & Livox).
The Harmony fusion engine has been adapted for use with ground-level trajectories and viewpoints, resulting in an affordable but effective navigation solution and corresponding outcomes (Single Frequency Gps, consumer-grade IMU, no odometry, consumer-grade lidars)
Rover-TC1-Livox
Following the acquisition session the data is downloaded to the processing server where the raw images, lidar and the navigation data are crunched together by the Harmony Engine to result with geo-referenced imagery, LIDAR + SFM point clouds, and 3D meshes.
Rover-TC1-Livox
Management
Garry Zalmanson, PhD
Founder and CEO
Garry Zalmanson has over 30 years of R&D and strategic management experience in photogrammetry, image processing, computer vision, electro-optics, digital mapping, and navigation.
Garry has conducted research at leading academic institutes and has hands-on experience working in hi-tech industry and with elite IDF technological units.
By founding LMY R&D in 2010, Garry has realized his vision on the synergy between academic & industry focused R&D – Providing advanced algorithm-driven yet industry-mature software solutions for both corporate and defence verticals. Garry has a PhD in photogrammetry from Ohio State University, a BSc in Geodesy and a BA in Applied Mathematics (both summa cum laude) from the Technion and a diploma in Computer Science from Tel Aviv University.

Amos Dror
VP Mapping and COO
Amos brings over 30 years of experience in the Geo-Spatial market, managing production lines and leading large teams of scientists, engineers and technicians. Throughout his long career (Lt. Colonel) in the IDF he has developed and implemented unique skills in production planning and scheduling, quality control, process improvement inventory control, and supply chain management.
As the Chief Operating Officer (COO) of the company Amos is responsible for overseeing the day-to-day LMY operations and implementing strategies to ensure the organization’s success. He super impressive communication skills and personality allow him to effectively communicate with employees, customers and stakeholders
Being primarily an expert in mapping and sensor hardware, Amos also provides hands-on support to LMY consultancy and service line of business.
Amos holds a BA in Geography (specializing in Remote Sensing and GIS) from Bar-Ilan University, and a MBA from Ben-Gurion University.

Tzuriel Vaknin
VP R&D
Tzuriel Vaknin is a seasoned software developer and R&D manager with a wealth of knowledge and experience across a range of development platforms and methodologies. With a background in algorithm-driven C/C++ multi-platform libraries and large-scale software projects, Tzuriel has a strong foundation in the fields of digital mapping, robotics, computer vision, and AI.
Starting as an interim developer at LMY R&D, Tzuriel has progressed to become a hands-on technology expert and respected manager with a proven track record of leading the design and implementation of mobile, web, and cloud-based solutions. Throughout his career, Tzuriel has taken projects from inception through to production and delivery cycles, ensuring high-quality outcomes every step of the way. Tzuriel holds a BSc in Computer Science from the Jerusalem College of Technology (JCT) and an MA in Computer Science with a specialization in Robotics and AI from Bar Ilan University.

Eran Rapatzki
VP Projects & Products
Eran Rapatzki is a technological leader with more than 25 years of experience in system development and project management. He has been with LMY for over 6 years and has been responsible for providing the company’s clients with research, development, and turnkey solutions.
Eran has experience in developing multi-disciplinary projects that integrate computer, video, audio and multimedia technologies, interactive and educational 2D and 3D games for museums and visitors centers and high-end presentations and sales tools using advanced user interface technologies.
Prior to his role at LMY R&D, Eran has held several positions, including CEO of Sirton-Art Technology Projects Ltd, which is a project management and consultancy company that specializes in entertainment and creative technology, and CTO of Breeze Creative, a studio that specializes in the planning, design, production, and management of immersive experiences.
He holds a Master of Business Administration in Strategy and Innovation management and a Bachelor’s degree in Computer Science.
Asaf Sela
Data Lead
With 15 years of experience in photogrammetry and geographic information systems, Asaf has established a reputation as an expert in the field. For the past several years, Asaf has been leading the Geo-Data team, overseeing all data-related tasks, and ensuring that the company’s products and services are up to industry standards.
In addition to Asaf’s expertise in geographic and standard databases, he is also responsible for testing and implementing the company’s systems, providing customer guidance and support, and ensuring that the products meet customer needs.
Asaf holds a Bachelor’s degree in Geography and History from Bar-Ilan University, as well as a certification in software testing from Sela college and ISTQB certification.

Raz Sharon
Chief Scientist
Raz is a skilled applied mathematician with exceptional analytical abilities, a deep understanding, and a passion for the underlying mathematics and computational techniques required to solve intricate problems. For the past decade, Raz has combined high-quality academic research with industry experience in photogrammetry and computer vision at LMY R&D.
During his tenure as an R&D researcher and algorithms team leader at LMY R&D, Raz has established a proven track record of conducting and managing top-quality research in photogrammetric computer vision, making him a prominent expert in the field. His work has primarily focused on developing algorithms for sensor modeling, optimization techniques for image and video registration, 3D reconstruction, and implementing machine learning algorithms and data analysis techniques.
Raz has published several peer-reviewed research papers on the academic stage.
Raz holds a BSc degree in Applied Mathematics and Physics from Hebrew University in Jerusalem, an MA in Applied Mathematics from Tel-Aviv University. Currently, he is in the process of completing a Ph.D. at Tel-Aviv University, School of Mathematical Sciences.